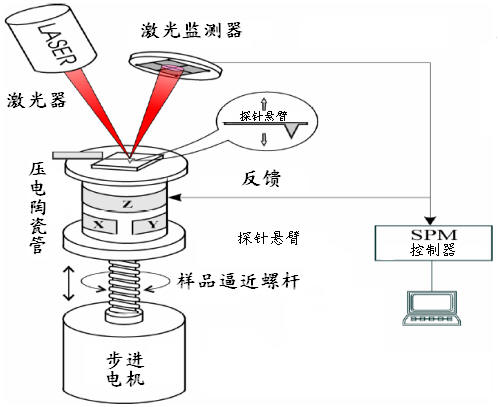
在原子力显微镜的系统中,可以分为三个部分,力检测部分,位置检测部分以及反馈系统。AFM原子力显微镜的核心部件是力的传感器件,包括微悬臂和固定于其一端的针尖。根据物理学原理,施加到Cantilever末端力的表达式为:F = KΔZ。其中ΔZ表示针尖相对于试样间的距离,K为Can2tilever的弹性系数,力的变化均可以通过Cantilever被检测。
原子力显微镜的关键部分是力敏感原件和力敏感检测装置。所以微悬臂和针尖是决定AFM灵敏度的核心。为了可以准确的反映样品表面跟探针针尖之间微弱的相互作用力的变化,得到更真实的样品表面的形貌,提高原子力显微镜(AFM)的的灵敏度,微悬臂的设计一般需要满足以下的条件。
1、较低的力学弹性系数,使很小的力就可以产生可观测的位移;
2、较高的力学共振频率;
3、高的横向刚性,针尖与样品表面的摩擦不会导致其弯曲;
4、微悬臂的长度尽可能的短一些;
5、微悬臂带有可以通过光学,电容或者是隧道电流方法检测其动态位移的镜子或电极;
6、针尖尽可能的尖锐。
以上就是为大家的原子力显微镜的结构正常了,想要了解更多原子力显微镜的相关信息,请关注我们本原的官方网站,本原纳米仪器是国内研究级扫描探针显微镜的专业制造商,公司提供原子力显微镜、AFM原子力显微镜,扫描探针显微镜,扫描隧道显微镜,静电力显微镜、磁力显微镜、扫描探针显微镜探针、SPM探针等产品。